
I received the PhD degree in signal and information processing from the Dalian University of Technology (DLUT) , Dalian, China in 2024.
My research interests include 3D computer vision, Robotic manipulation and Robotic system engineering.
WeChat: qq1136558142
Publications

A Generalizable and Robust Vision-Language-Action (VLA) Model for Long-Horizon and Dexterous Tasks.
Author List: Chilam Cheang, Sijin Chen, Zhongren Cui, Yingdong Hu, Liqun Huang, Tao Kong, Hang Li, Yifeng Li, Yuxiao Liu, Xiao Ma, Hao Niu, Wenxuan Ou, Wanli Peng , Zeyu Ren, Haixin Shi, Jiawen Tian, Hongtao Wu, Xin Xiao, Yuyang Xiao, Jiafeng Xu, Yichu Yang
Bytedance Seed Robotics
Webpage •
Paper
We propose a category-level multi-fingered functional grasp transfer framework.
Rina Wu, Tianqiang Zhu, Wanli Peng , Jinglue Hang, Yi Sun*
RAL, 2023
Paper •
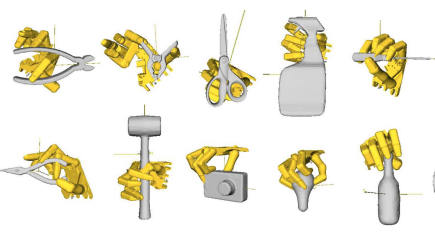
A semantic representation of functional hand-object interaction is introduced without labeling 3D hand poses, and a novel coarse-to-fine grasp generation network is designed to model this hand-object interaction.
Yibiao Zhang,Jinglue Hang, Tianqiang Zhu, Xiangbo Lin*, Rina Wu, Wanli Peng , Dongying Tian, Yi Sun
RAL, 2023
Paper •
Code
We propose TransGrasp, a category-level grasp pose estimation method that predicts grasp poses of a category of objects by labeling only one object instance.
Hongtao Wen, Jianhang Yan, Wanli Peng*, Yi Sun
ECCV, 2022
Webpage •
Paper •
Code
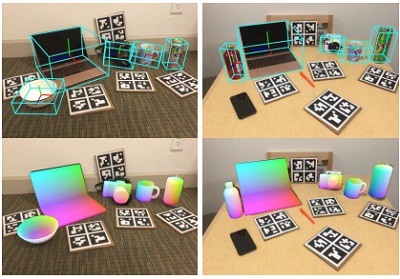
A self-supervised method for category-level 6D pose estimation, SSC-6D, which can predict unseen object poses without explicit pose annotations and exact 3D models in real scenarios for training.
Wanli Peng, Jianhang Yan, Hongtao Wen, Yi Sun*
AAAI, 2022
Webpage •
Paper •
Code
Projects

We built a complete robot manipulation pipeline based on ROS, where where we use our TransGrasp to predict robust grasp poses for robotic manipulation.
- Robot-assisted watering mobility-impaired individuals.
- Autonomously pouring water from cup into bowl.
- Autonomously grasping household objects.
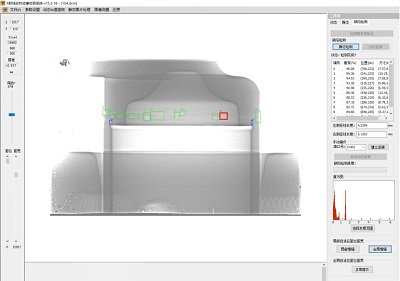
- An automatic defect detection software based on X-ray real-time imaging.
- Automatic unattended operation of image acquisition, defect detection and workpiece sorting.
- Enhance details of weak targets using the MUSICA algorithm.
- Reimplement the forward propagation of Deep Learning algorithm based on CUDA.
- Achieve less than 1% false negative rate in the actual production environment.